

Growing up in a region known for its delicious wild mushrooms, I witnessed how rewarding, risky foraging can be.
MycoRover is a spherical robot designed to guide users through forest terrain, making mushroom hunting safer, more playful, and more accessible for everyone.
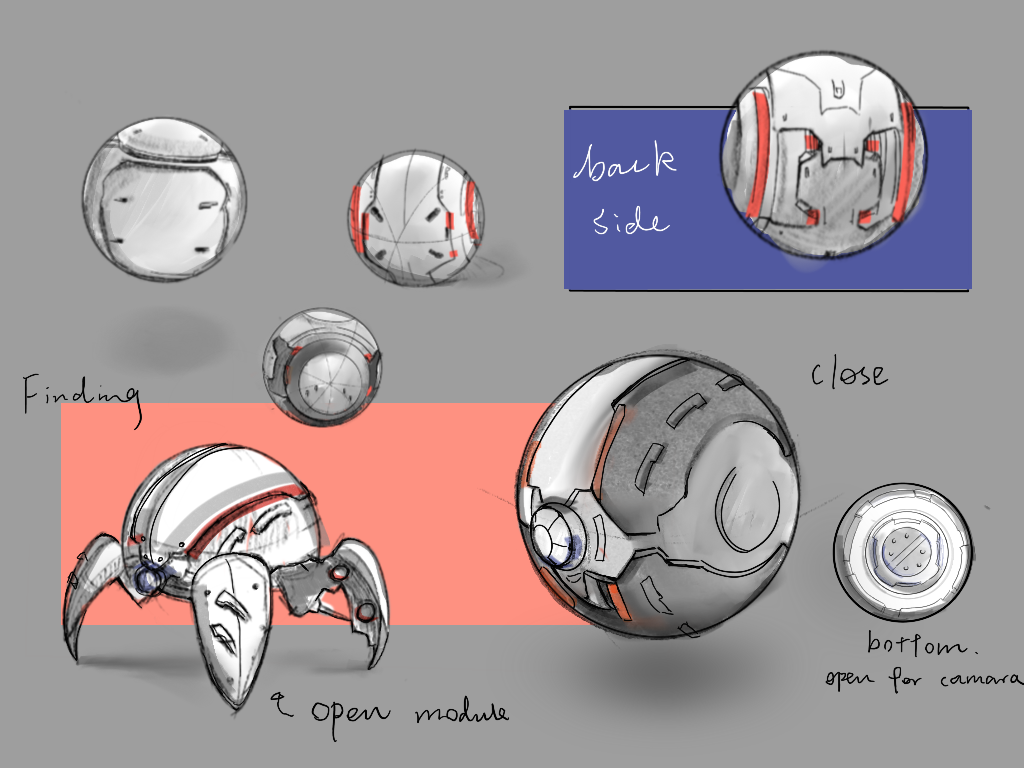
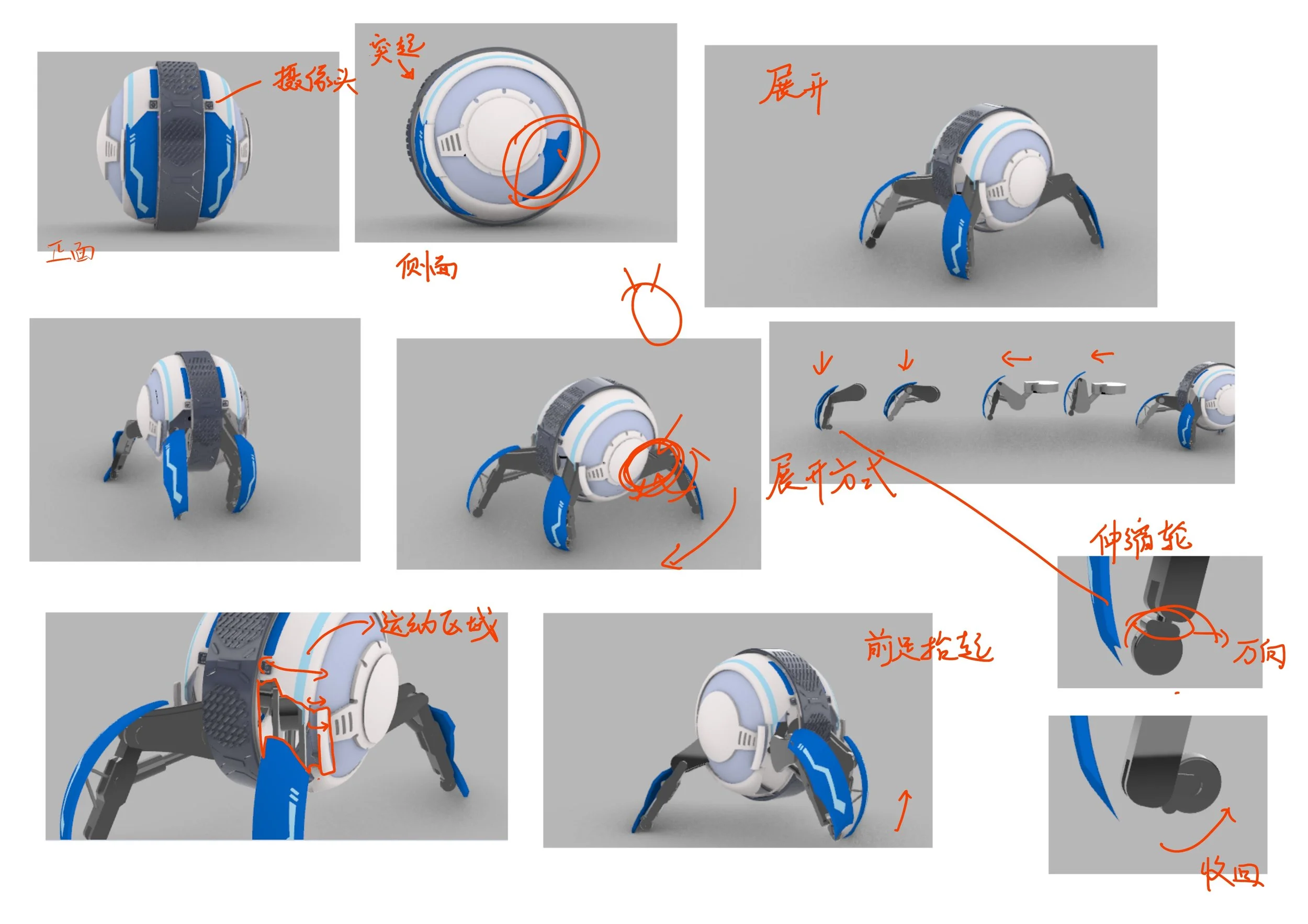
Transformable
Mycorover transforming demonstration
The MycoRover is more than just a concept; I've built working prototypes and iterated using an Arduino and various electronic components to bring it to life.
Its movement is based on the principle of conservation of angular momentum, enabling dynamic balance and transformation. In the final prototype, I used infrared sensors for obstacle avoidance, simulating how the robot would navigate through mountainous terrain in real world scenarios.
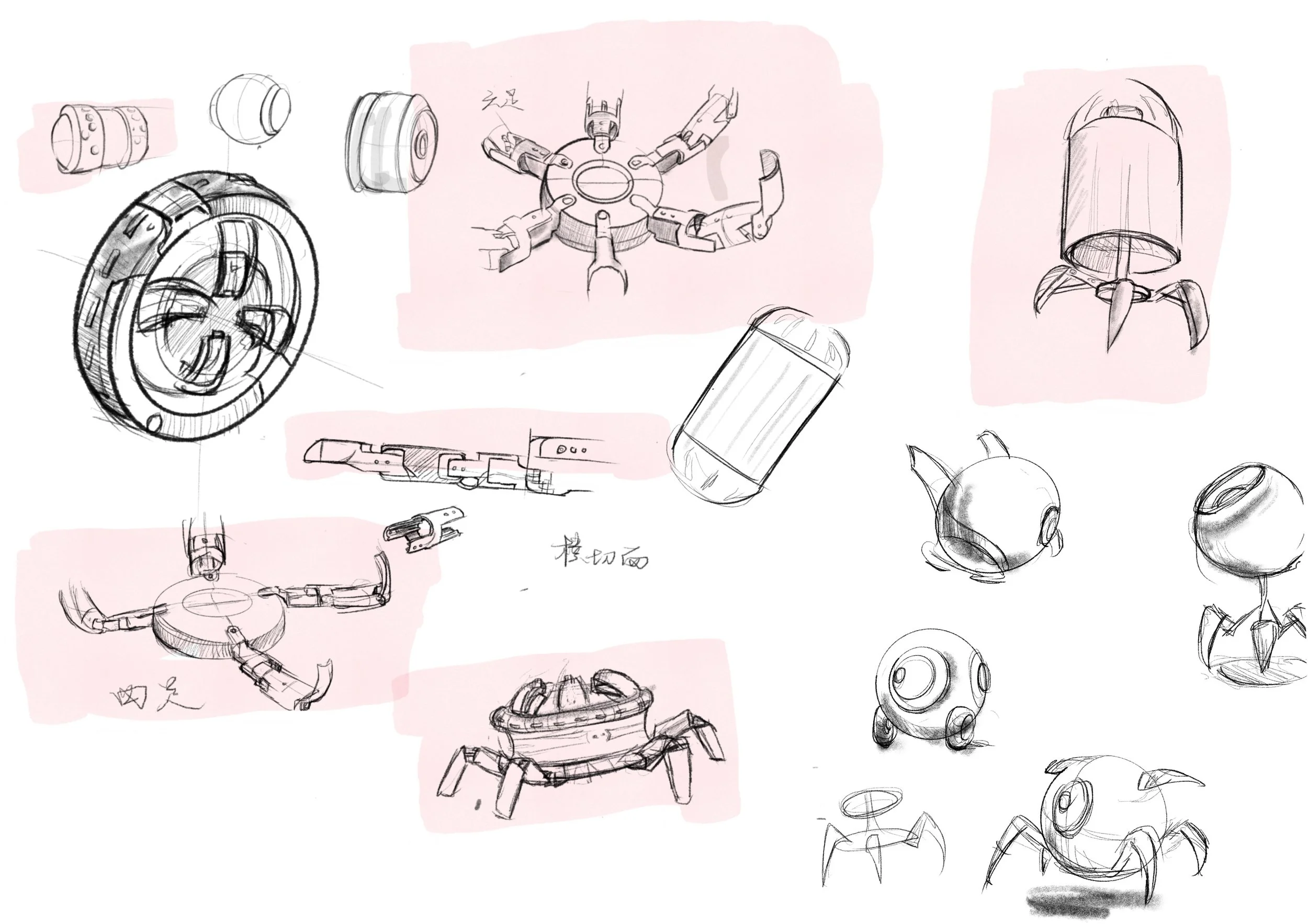
Inspired by the spider’s adaptability, MycoRover can shift between a compact spherical form and a four legged configuration. This allows it to easily navigate through diverse terrains ,from rocky paths to dense forest floors.
Bring to real world
Mycorover prototype demonstration


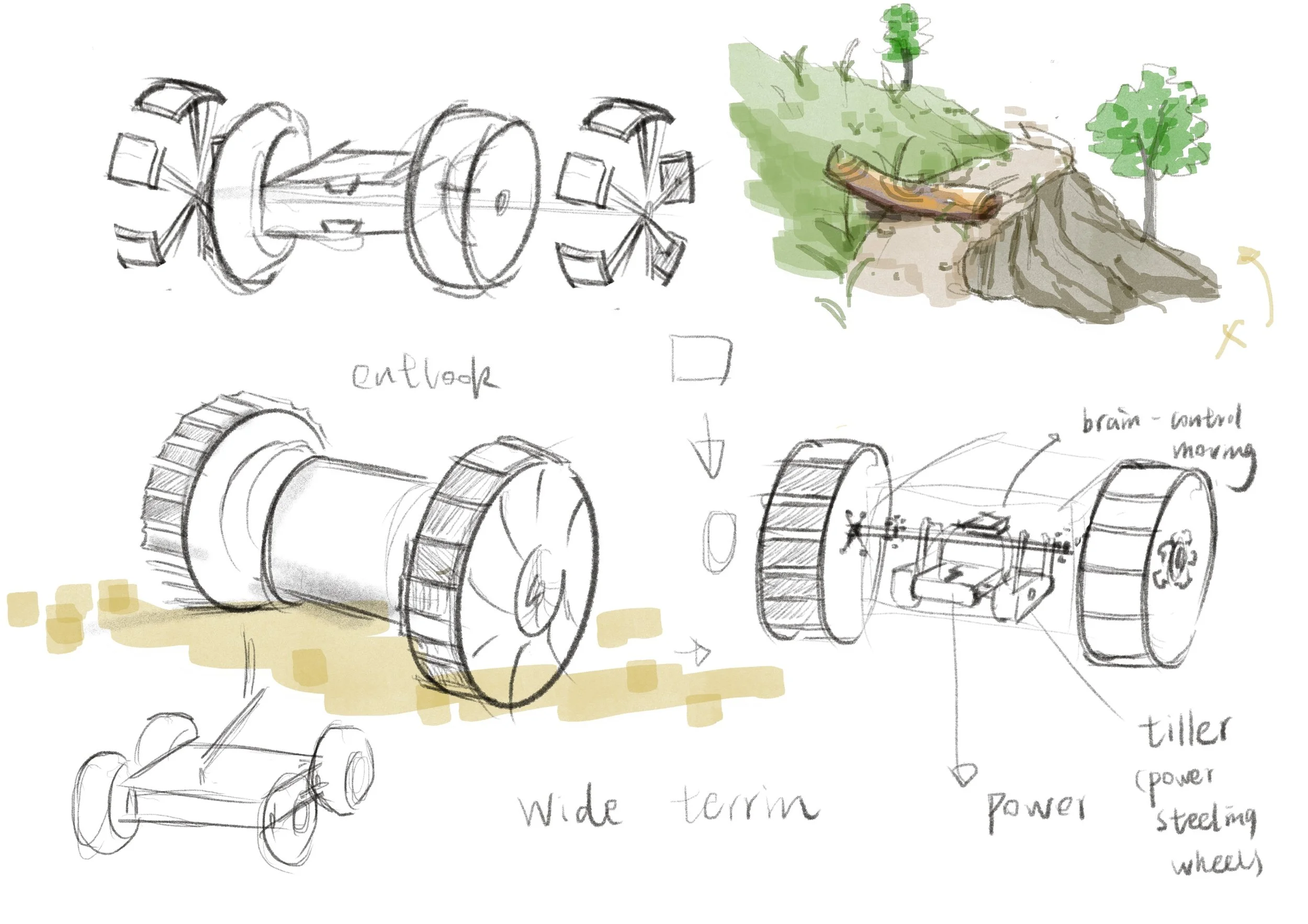
Concept develop

Initial digital model
Initial roll-out rendering
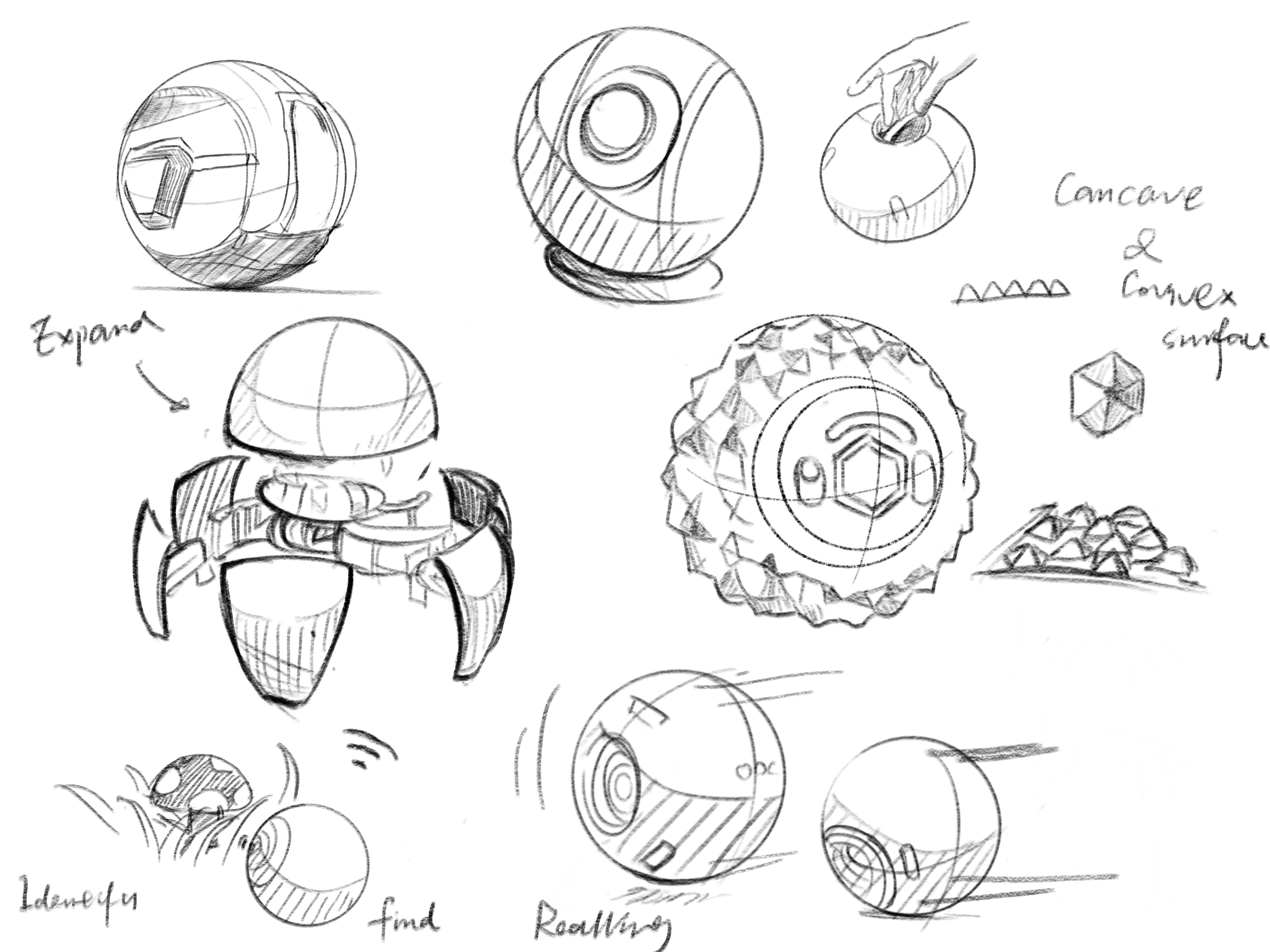
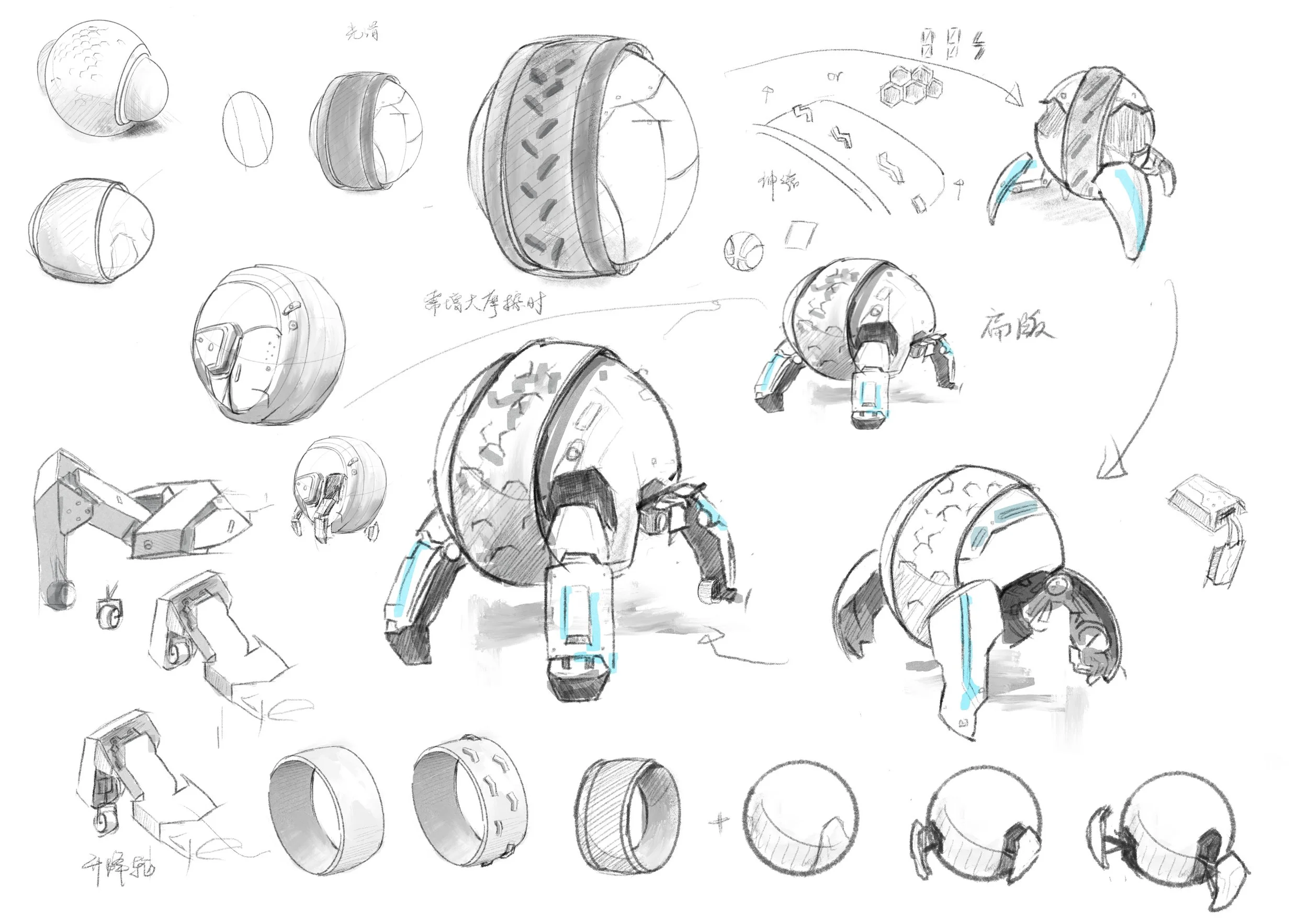
The initial concept started with a simple rolling wheel form. However, I soon realized that for the robot to traverse natural terrain, it would need a better ability to overcome obstacles. This led me to explore how to integrate deployable legs into a rolling structure:maintaining mobility while enhancing adaptability.
Initial roll out way testing

Initial close ball mode rendering

Present Board


Physical Model
Physical Model
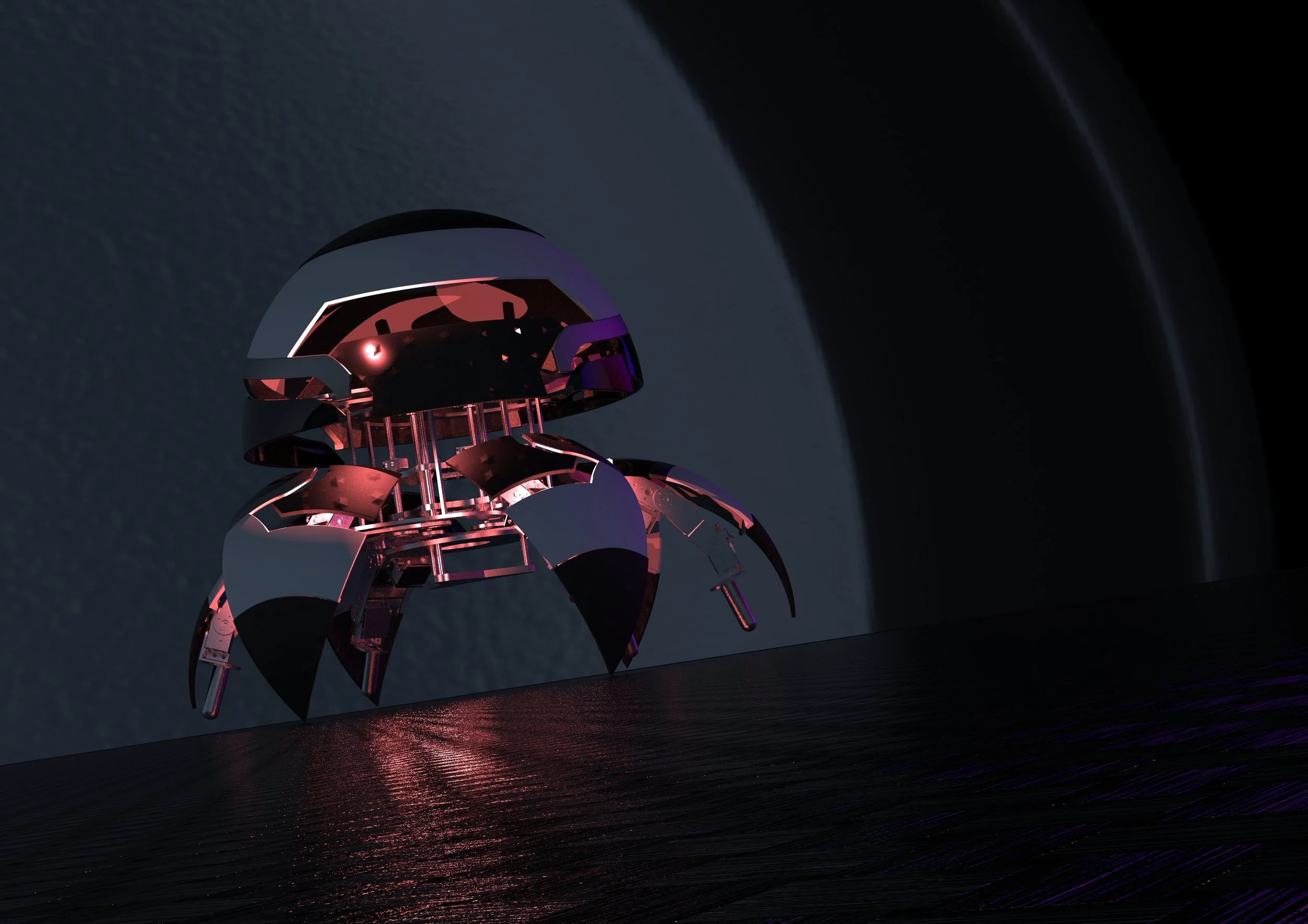
Final outcomes

Conceptual Model

Conceptual Model
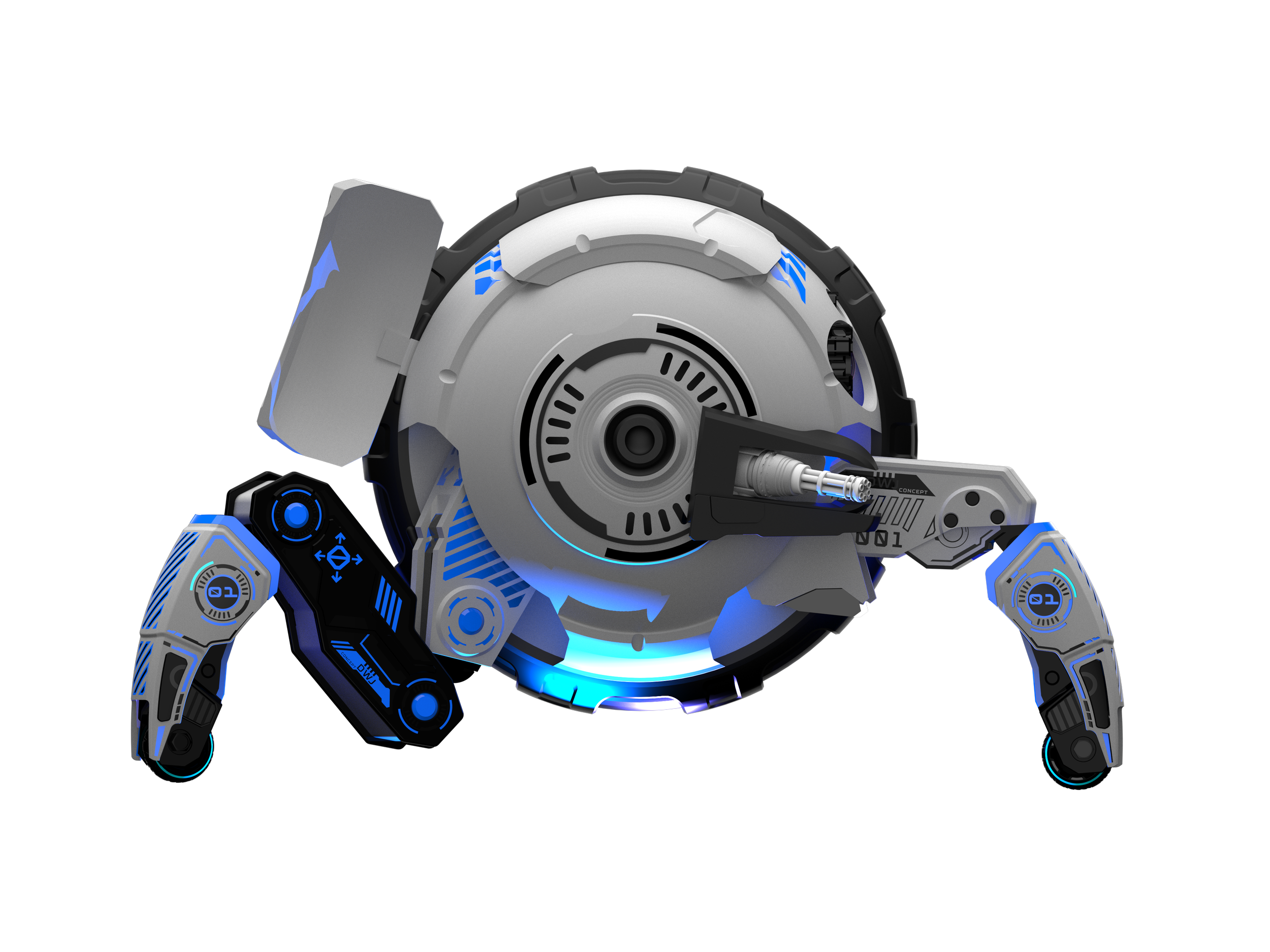
Conceptual Model

Physical model